本文最后更新于69 天前,其中的信息可能已经过时,如有错误请发送邮件到2275012286@qq.com,或者在下方留言。
想了解更多项目请搜索“项目”标签或者访问我的github仓库。
仓库地址:QianmoNai’s Repositories
RM2026赛季新英雄上层板的达妙mc_02开发板的代码(正在维护)
项目地址:QianmoNai/RM2026_hero_up_board_code
战队仓库地址:FZSDRM
ps:关注浮舟湿地喵,关注浮舟湿地战队谢谢喵~
浮舟湿地战队-哔哩哔哩
浮舟湿地战队-抖音
1.项目背景
本项目基于湖大跃鹿战队的H723VGT6主控的达妙MC02开发板移植的电控通用嵌入式框架
原始仓库的Gitee链接:https://gitee.com/hnuyuelurm/basic_framework_mc02
达妙MC-02开发板资料仓库链接:https://gitee.com/kit-miao/dm-mc02
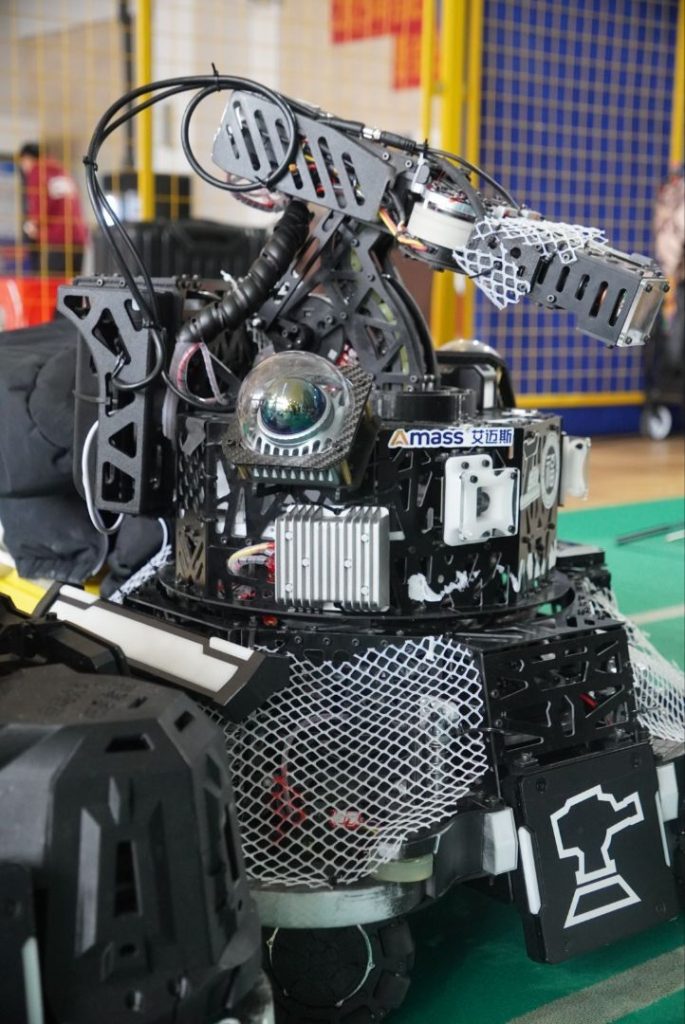
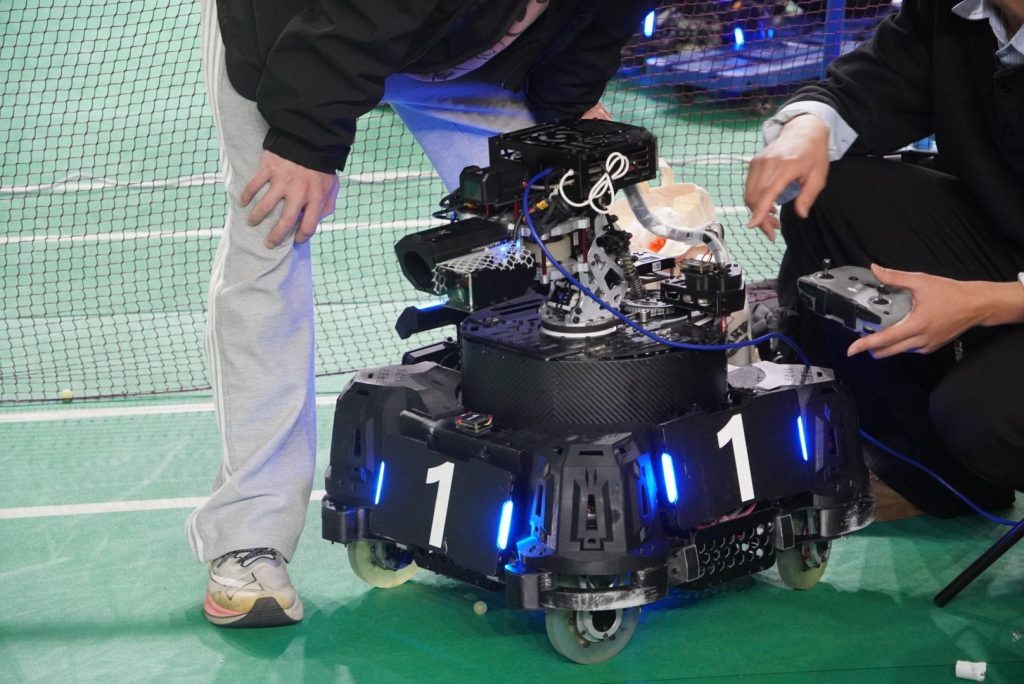
2.项目介绍
Hero 项目介绍
面向 RoboMaster 英雄机器人场景的嵌入式控制工程,聚焦云台控制、发射机构、视觉联动与双板协同通信。
Control Core
云台 + 发射控制
Architecture
BSP / Module / App
Communication
CANComm + USB VCP
项目简介
本项目是一个面向 RoboMaster 英雄机器人场景的嵌入式控制工程,基于 STM32H723 平台与 FreeRTOS 实现,当前配置以 DM-MC02 上层云台板为核心,完成了云台控制、发射机构控制、视觉联动、底盘协同通信等关键能力。
项目继承了通用机器人电控框架的分层设计思想,同时结合当前机器人硬件配置进行了定制化开发,适用于英雄机器人或同类双板协同控制系统的快速部署与迭代。
项目特点
1. 分层清晰,便于扩展
项目采用 BSP -> Module -> Application 三层结构:
bsp层负责底层外设抽象,如 CAN、USART、USB、PWM、ADC、SPI、I2C 等modules层负责功能模块封装,如电机、IMU、视觉通信、消息中心、超级电容、守护进程等application层负责整车业务逻辑,包括robot_cmd、gimbal、shoot、chassis
2. 发布订阅机制降低耦合
robot_cmd统一接收遥控器、图传、键鼠和视觉输入gimbal、shoot、chassis分别订阅控制命令并执行
3. 支持双板协同与多链路通信
- 遥控器 / 图传 / 键鼠 / 视觉上位机
- USB VCP / UART 视觉高速交互
- CANComm 板间通信
4. 面向实时控制的任务设计
- INS Task:IMU 解算
- Motor Task:电机闭环
- Daemon Task:离线检测
- Robot Task:整车逻辑
核心功能
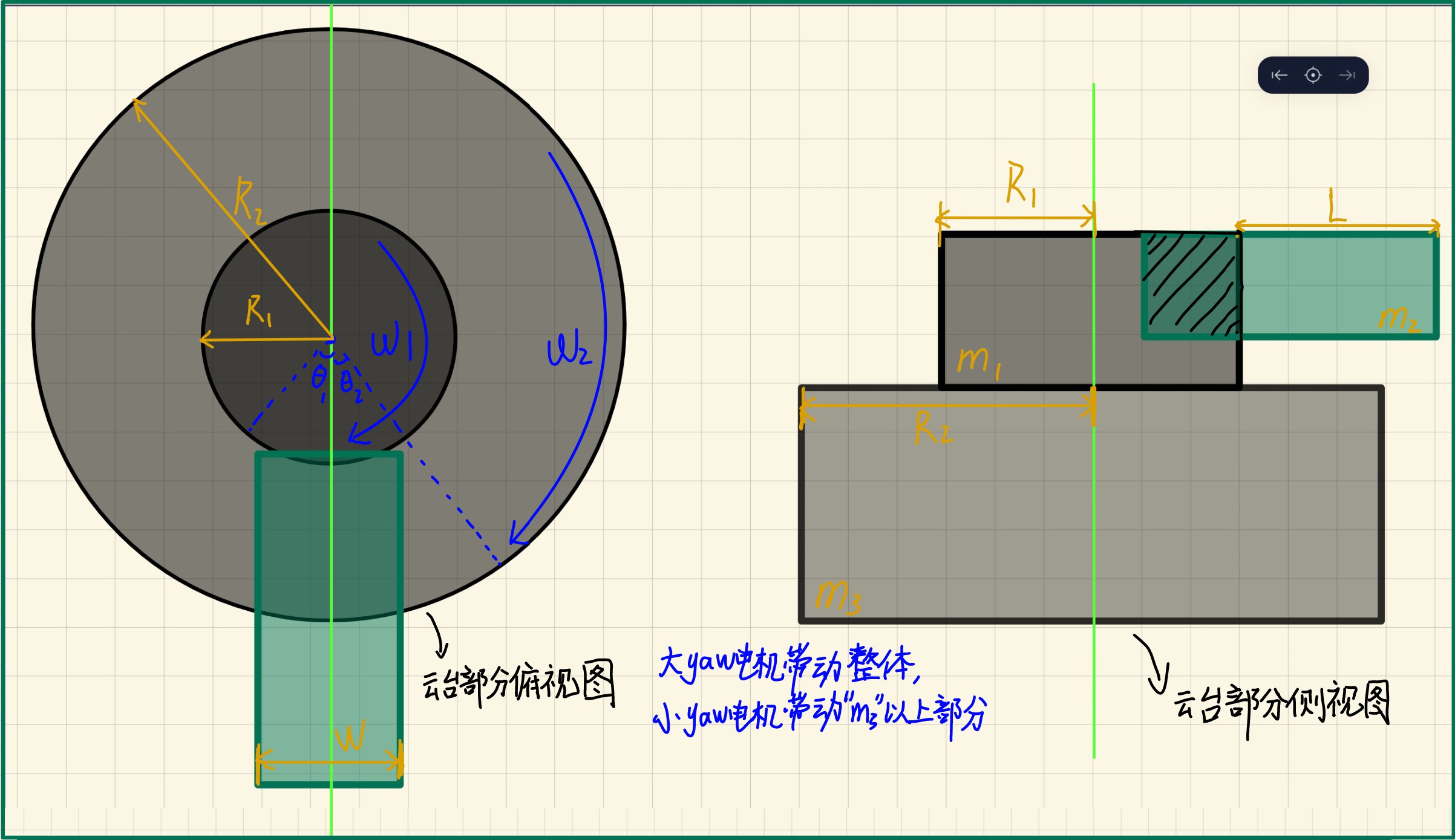
云台控制
- 双Yaw+单Pitch DM电机控制
- IMU姿态闭环
- 支持手动/视觉瞄准切换
发射机构控制
- M3508摩擦轮速度闭环
- DM4310拨弹控制
- 卡弹反向退弹保护
- 热量限制逻辑
视觉联动
- 接收 tracking / fire / aimYaw / aimPitch
- 回传姿态、颜色、模式、弹速
- 视觉辅助瞄准 + 自动开火
底盘协同
- 麦克纳姆运动学解算
- 底盘跟随云台
- 小陀螺模式
- 超级电容接口
多输入融合
- 遥控器/图传/键鼠/视觉统一调度
- 生成云台/发射/底盘指令
工程优势
- 架构解耦清晰,易维护扩展
- 控制链路完整:云台/发射/视觉/通信
- 双板兼容,适合复杂机器人
- 模块复用性强
- 带守护、日志、调试工程化能力
当前工程定位
一个基于 STM32H723 和 FreeRTOS 的 RoboMaster 英雄机器人云台控制工程,具备视觉辅助瞄准、发射机构控制、双板通信扩展能力以及完整的模块化软件架构。
适用场景
- RM英雄机器人上层控制板开发
- 云台+发射联调
- 视觉自瞄对接
- 双板机器人架构开发
- 嵌入式控制框架二次开发