本文最后更新于71 天前,其中的信息可能已经过时,如有错误请发送邮件到2275012286@qq.com,或者在下方留言。
想了解更多项目请搜索“项目”标签或者访问我的github仓库。
仓库地址:QianmoNai’s Repositories
RM2026英雄上层板的达妙mc_02开发板的代码(停止维护)
1.项目背景
本项目基于湖大跃鹿战队的H723VGT6主控的达妙MC02开发板移植的电控通用嵌入式框架
原始仓库的Gitee链接:https://gitee.com/hnuyuelurm/basic_framework_mc02
达妙MC-02开发板资料仓库链接:https://gitee.com/kit-miao/dm-mc02
2.项目介绍
本项目针对福州大学浮舟湿地战队的英雄兵种的上层板设计,负责云台,发射,拨弹盘,板间通信部分控制。对湖大跃鹿战队的代码做了补充和修复。
1.增加了达妙电机的pid单、双环控制等部分的代码。
2.增加了对达妙imu的适配。
3.解决了无法读取的达妙电机数据的问题。
3.项目重点内容
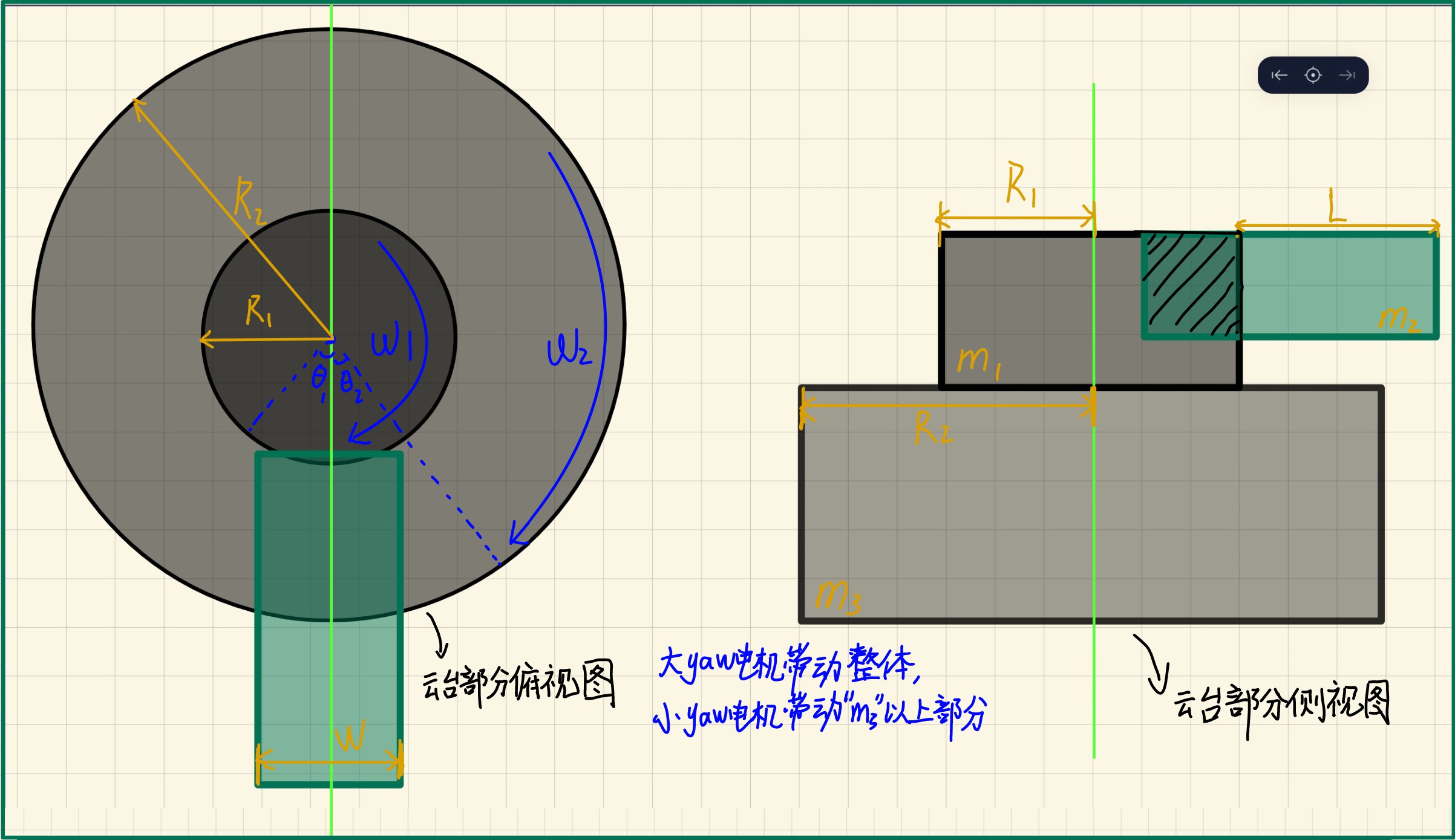
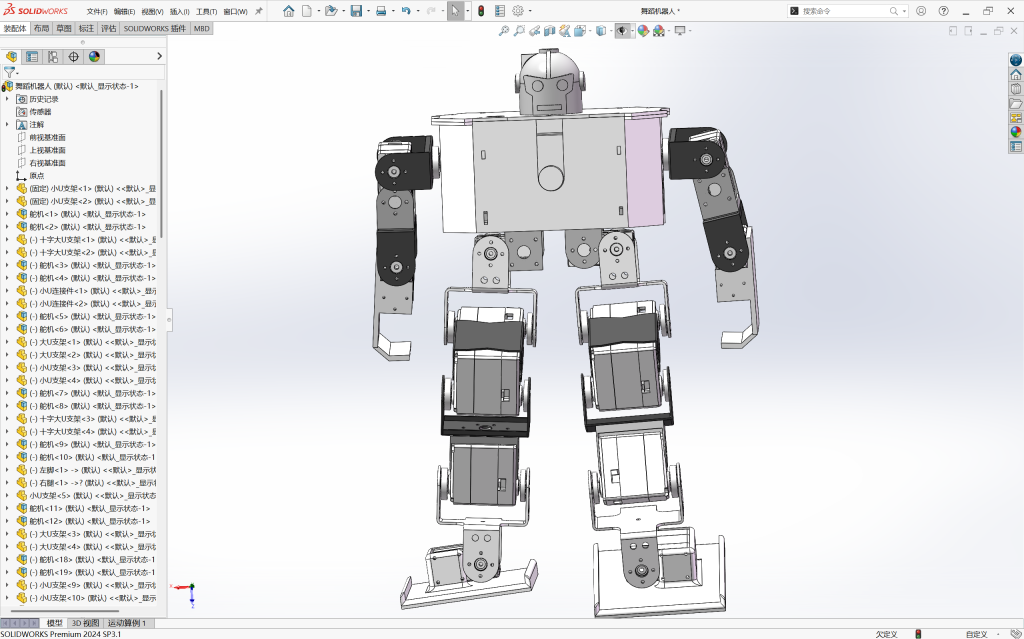
①大小yaw云台控制
英雄的机械结构的yaw轴部分有两层,分别是大yaw和小yaw。PID方面大yaw的PID控制比较软,不追求响应速度,小yaw的PID控制比较硬,追求响应的速度和精度。相比单 yaw 轴云台,在稳定性、负载适应性、控制精度等多方面都有优势。
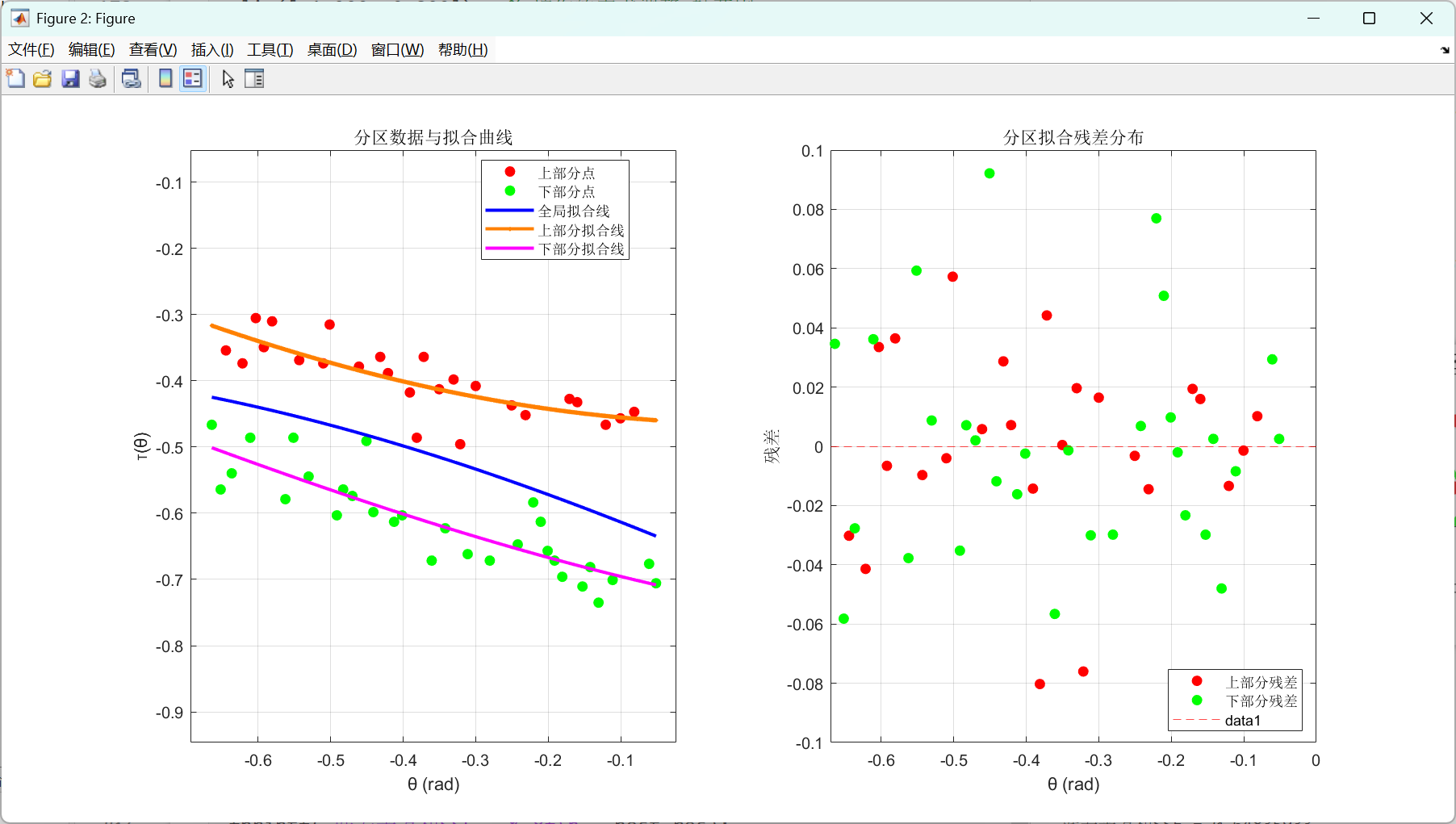
②pitch电机的软件重力补偿
pitch 电机的软件重力补偿,能通过算法实时抵消负载重力力矩,提升全角度控制精度与响应速度,优化云台稳定性、减少低频抖动。
③达妙电机控制逻辑
控制的实现是通过PID位置外环+mit电机速度内环实现,这样做避免了拨弹盘电机的位置范围只能-4π到4π所带来的必须设置零点的累积误差,同时也能在电机控制中添加前馈,实现更加精确高效的控制。另一种是PID双环都是在单片机里面完成的,这样做的原因是为了更好添加软件上的重力补偿力矩前馈。